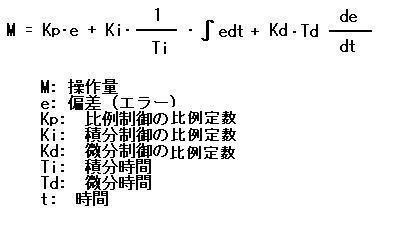
PID制御は、比例制御(Proportional Control)、積分制御(Integral Control)、微分制御(Derivative Control)を組み合わせて設定値に収束させる制御のことです。基本的なPID制御の式を次に示します。この式はPID制御の基本的な概念を説明するためのものですから、現在いろんな改善がなされていますがそれらはこの式には含まれていません。
比例制御(P制御)は偏差(設定値と現在値の差)に比例させて操作量を変えます。したがって偏差が大きいほど操作量が大きく、設定値に近づく速度が速くなります。また設定値に近づくと操作量が小さくなり設定値に近づく速度が小さくなります。ところが操作量が小さくなりすぎると制御される側が反応せず偏差が残ったままになります。(定常偏差) この欠点を補うのが積分制御(I制御)です。積分制御は偏差を足していき、その値に比例して操作量を変えるため定常偏差を解消することができます。設定値に到達させるだけであればこれらを組み合わせたPI制御(比例制御と積分制御)で可能です。しかし積分制御は偏差を足していくため時間がかかります。このため現在値が設定値からずれた場合、PI制御ですとある程度時間が経ってからでないとシステムが反応しません。この欠点を補うために微分制御(D制御)があります。微分制御は偏差の変化率、つまり偏差が変化する速度を捉え、これに比例した操作量をだすため応答速度が早くなります。これらの3つの制御を組み合わせたものがPID制御です。
PID制御の基本式(上記)を見ると分かりますが、P、I、D制御の3つの操作量をたして全体の操作量としています。制御回路などを考えるには簡単でいいのですが、それぞれ役割の違うものを強引に足して全体の操作量としているわけですから弊害が出てきます。CPUが小型化、高性能化され価格も安くなっているのですから、場合に応じた制御をすれば良いと思うのですが。それでもまだまだPID制御はよく使われています。弊害と言いましたがそれはチューニングのことを言っています。P、I、Dそれぞれを意図(上記)したように動かすためにはそれらの大きさを調節する必要があります。また操作量に対する被制御システムの応答性によってP、I、Dの最適値が変わってきますのでシステムごとにチューニングが必要となるわけです。(同じシステムは同じ値でよい。) P、I、Dの意味を知ってチューニングを行えば早く最適値が見つかるかもわかりません。
|